

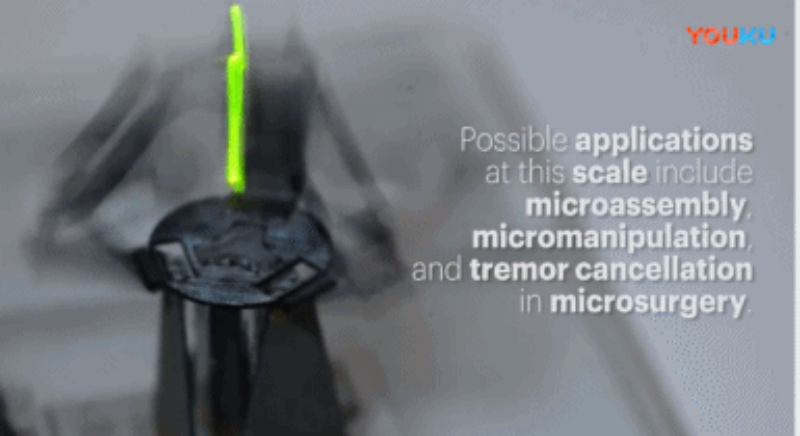
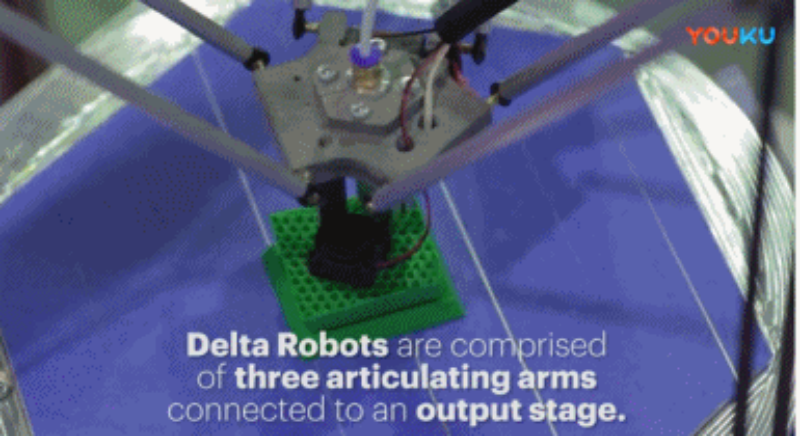
외신 보도에 따르면, 델타 로봇은 빠른 속도와 유연성 덕분에 조립 라인에서 널리 활용될 수 있지만, 이러한 작업에는 넓은 공간이 필요합니다. 최근 하버드 대학교 엔지니어들은 밀리델타(MilliDelta)라는 세계에서 가장 작은 로봇 팔을 개발했습니다. 이름에서 알 수 있듯이, 밀리엄+델타(Millium+Delta), 즉 최소 델타는 몇 밀리미터 길이에 불과하며, 일부 최소 침습 수술에서도 정밀한 선별, 포장 및 제조가 가능합니다.
2011년, 하버드 대학교 위시안 연구소의 한 연구팀은 팝업 마이크로전자기계시스템(MEMS) 제조라는 이름의 마이크로로봇용 평면 제조 기술을 개발했습니다. 지난 몇 년 동안 연구자들은 이 아이디어를 현실로 구현하여 자가 조립식 기어다니는 로봇과 로보비(Robobee)라는 이름의 민첩한 벌 로봇을 개발했습니다. 최신 밀리델크트(MilliDelct) 또한 이 기술을 사용하여 제작되었습니다.
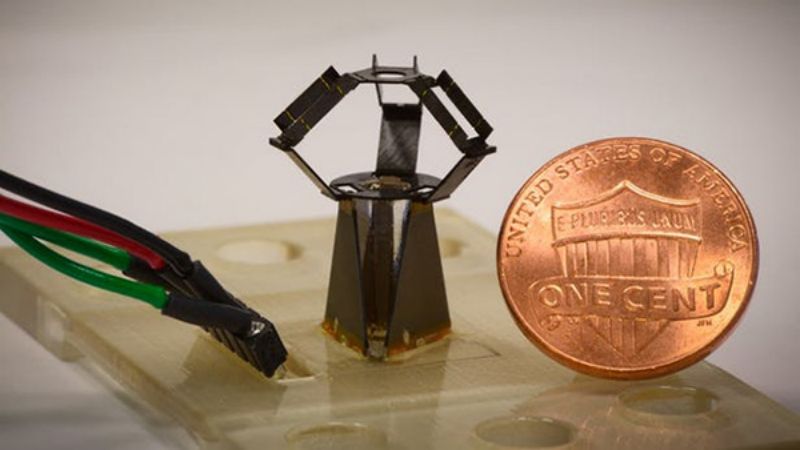
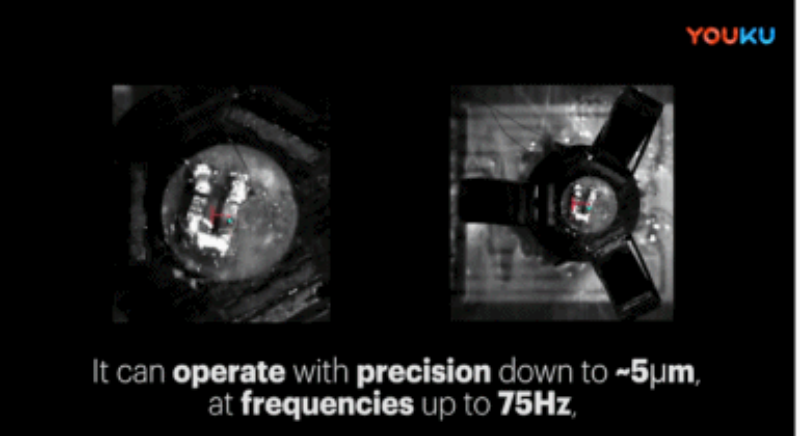
밀리델타는 복합 적층 구조와 여러 개의 유연한 관절로 구성되어 있으며, 풀사이즈 델타 로봇과 동일한 민첩성을 제공할 뿐만 아니라 7mm³의 작은 공간에서도 5마이크로미터의 정확도로 작업할 수 있습니다. 밀리델타 자체의 크기는 15 x 15 x 20mm에 불과합니다.
이 작은 로봇팔은 대형 로봇팔의 다양한 활용 분야를 모방하여 실험실의 전자 부품, 배터리 등 작은 물체를 집어 포장하거나, 미세수술 시 안정적인 손 역할을 하는 데 활용될 수 있습니다. 밀리델타(MilliDelta)는 최초의 인간 떨림 치료 장치 테스트에 참여하여 첫 수술을 성공적으로 마쳤습니다.
관련 연구 보고서는 Science Robotics에 게재되었습니다.
게시 시간: 2023년 9월 15일